




Attitudemålingssystem




produktegenskaber
MS-100A0 er en tre-frihedsgrad-attitude baseret på mikromekanisk teknologi (MEMS)
Målesystem, indbygget højtydende MEMS-gyroskop og MEMS-accelerometer, gennem filtreringsalgoritmen beregner stigningsvinklen, rullevinklen og kursvinklen for bæreren i realtid.også valgfrit matchet med et magnetometer for at opnå højpræcision nord-finding, og output 3-akset vinkelhastighed og 3-akset acceleration bruges til bevægelseskontrol.
Produktkarakteristik
- Bedre end 0,1° holdningsnøjagtighed
- Attitudemåleområde ±90°
- Driftstemperaturområde: -40 ~ 65 ℃
- Vibrationsmiljø: 10~2000Hz, 6g (RMS)
- Rige grænsefladetyper, understøtter RS232, RS422, CAN og andre standardgrænseflader
- Vandtæt tætningsdesign
elektriske egenskaber
- Strømforsyning: 5V (typ.), tilpasselig bred spændingsindgang 12~36V
- Nominel effekt: 0,5W (maks.)
- Ripple: 100mV (peak-to-peak)
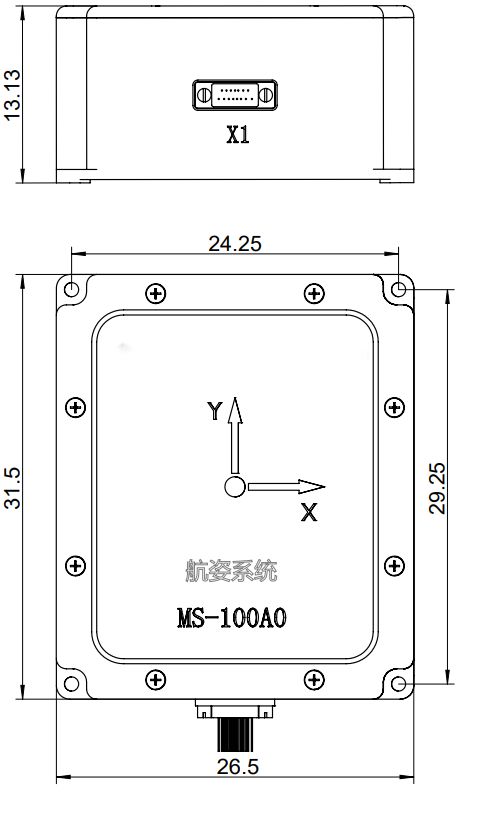
Mekaniske dimensioner
Tekniske indikatorer
| Gyro parametre | ||||
| Parameter |
Testbetingelser | Typisk værdi |
Max værdi | Enhed |
| Dynamisk måleområde |
|
| 450 | º/s |
| Nul bias stabilitet | Allan-varians, Z-akse | 0,8 |
| º/t |
| Allan-varians, X-akse og Y-akse | 1.6 |
| º/t | |
| 10s gennemsnit, X, Y-akse (-40℃~+80℃, konstant temperatur) | 6 |
| º/t | |
| 1s gennemsnit, X, Y-akse (-40℃~+80℃, konstant temperatur) | 9 |
| º/t | |
| Nul offset | Nul offset område | ±0,2 |
| º/s |
| Nul bias ændring over hele temperaturområdet | ±0,06 |
| º/s | |
| Gentagelighed fra start til start | 0,006 |
| º/s | |
| Dag-til-dag start gentagelse | 0,009 |
| º/s | |
| Indflydelse af lineær acceleration på nul bias | 0,002 |
| º/s | |
| Påvirkningen af vibrationer på nul offset, ændringen før og efter vibration | 0,002 |
| º/s | |
| Påvirkningen af vibrationer på nul offset, ændringen før vibration | 0,002 |
| º/s | |
| Skaleringsfaktor | Skalafaktornøjagtighed, Z-akse | 0,3 |
| % |
| Skalafaktornøjagtighed, X, Y-akse | 0,6 |
| % | |
| Skalafaktor ulinearitet, Z-akse | 0,01 |
| %FS | |
| Skalafaktor ulinearitet, X, Y-akse | 0,02 |
| %FS | |
| Vinkel tilfældig gang |
| 0,001 |
| °/√t |
|
Støjtæthed |
| 0,001 |
| °/s/√t |
| Løsning |
| 3.052×10−7 |
| º/s/LSB |
| Båndbredde |
| 200 |
| Hz |
| Accelerometer parametre | ||||
| Parameter |
Testbetingelser |
Typisk værdi | Max værdi | Enhed |
| Dynamisk måleområde |
| 16 |
| g |
| Nul bias stabilitet | Allan varians | 0,03 |
| mg |
| 10s gennemsnit (-40℃~+80℃, konstant temperatur) | 0,2 |
| mg | |
| 1s gennemsnit (-40℃~+80℃, konstant temperatur) | 0..3 |
| mg | |
| Nul offset | Nul offset område | 5 |
| mg |
|
Nul offset variation (spids-til-spids) over hele temperaturområdet | 5 |
| mg | |
| Gentagelighed fra start til start | 0,5 |
| mg | |
| Dag-til-dag start gentagelse | 0,8 |
| mg | |
| Nul bias temperaturkoefficient | 0,05 | 0,1 | mg/℃ | |
| Skaleringsfaktor | Skalafaktornøjagtighed | 0,5 |
| % |
| Skalafaktor ikke-linearitet | 0,1 |
| %FS | |
| Hastighed tilfældig gang |
| 0,029 |
| m/s/√t |
| Støjtæthed |
| 0,025 |
| mg/√Hz |
| Løsning |
| 1.221×10−8 |
| g/LSB |
| Båndbredde |
| 200 |
| Hz |
| Magnetometerparametre (valgfrit) | ||||
| Parameter | Testbetingelser |
Typisk værdi | Max værdi |
Enhed |
| Dynamisk måleområde |
| 2.5 |
| gauss |
| Nul offset | Ikke-magnetisk miljø | 15 |
| mgauss |
| Overskrifts nøjagtighed | ||||
| Magnetisk retningsnøjagtighed |
| 0,5 |
| ° |
| Horisontal holdningsnøjagtighed | ||||
|
Pitch vinkel nøjagtighed |
| 0,1 |
| ° |
| Rullevinkelnøjagtighed |
| 0,1 |
| ° |
| Gyro parametre | ||||
| Parameter |
Testbetingelser | Typisk værdi |
Max værdi | Enhed |
| Dynamisk måleområde |
|
| 450 | º/s |
| Nul bias stabilitet | Allan-varians, Z-akse | 0,8 |
| º/t |
| Allan-varians, X-akse og Y-akse | 1.6 |
| º/t | |
| 10s gennemsnit, X, Y-akse (-40℃~+80℃, konstant temperatur) | 6 |
| º/t | |
| 1s gennemsnit, X, Y-akse (-40℃~+80℃, konstant temperatur) | 9 |
| º/t | |
| Nul offset | Nul offset område | ±0,2 |
| º/s |
| Nul bias ændring over hele temperaturområdet | ±0,06 |
| º/s | |
| Gentagelighed fra start til start | 0,006 |
| º/s | |
| Dag-til-dag start gentagelse | 0,009 |
| º/s | |
| Indflydelse af lineær acceleration på nul bias | 0,002 |
| º/s | |
| Påvirkningen af vibrationer på nul offset, ændringen før og efter vibration | 0,002 |
| º/s | |
| Påvirkningen af vibrationer på nul offset, ændringen før vibration | 0,002 |
| º/s | |
| Skaleringsfaktor | Skalafaktornøjagtighed, Z-akse | 0,3 |
| % |
| Skalafaktornøjagtighed, X, Y-akse | 0,6 |
| % | |
| Skalafaktor ulinearitet, Z-akse | 0,01 |
| %FS | |
| Skalafaktor ulinearitet, X, Y-akse | 0,02 |
| %FS | |
| Vinkel tilfældig gang |
| 0,001 |
| °/√t |
|
Støjtæthed |
| 0,001 |
| °/s/√t |
| Løsning |
| 3.052×10−7 |
| º/s/LSB |
| Båndbredde |
| 200 |
| Hz |
| Accelerometer parametre | ||||
| Parameter |
Testbetingelser |
Typisk værdi | Max værdi | Enhed |
| Dynamisk måleområde |
| 16 |
| g |
| Nul bias stabilitet | Allan varians | 0,03 |
| mg |
| 10s gennemsnit (-40℃~+80℃, konstant temperatur) | 0,2 |
| mg | |
| 1s gennemsnit (-40℃~+80℃, konstant temperatur) | 0..3 |
| mg | |
| Nul offset | Nul offset område | 5 |
| mg |
|
Nul offset variation (spids-til-spids) over hele temperaturområdet | 5 |
| mg | |
| Gentagelighed fra start til start | 0,5 |
| mg | |
| Dag-til-dag start gentagelse | 0,8 |
| mg | |
| Nul bias temperaturkoefficient | 0,05 | 0,1 | mg/℃ | |
| Skaleringsfaktor | Skalafaktornøjagtighed | 0,5 |
| % |
| Skalafaktor ikke-linearitet | 0,1 |
| %FS | |
| Hastighed tilfældig gang |
| 0,029 |
| m/s/√t |
| Støjtæthed |
| 0,025 |
| mg/√Hz |
| Løsning |
| 1.221×10−8 |
| g/LSB |
| Båndbredde |
| 200 |
| Hz |
| Magnetometerparametre (valgfrit) | ||||
| Parameter | Testbetingelser |
Typisk værdi | Max værdi |
Enhed |
| Dynamisk måleområde |
| 2.5 |
| gauss |
| Nul offset | Ikke-magnetisk miljø | 15 |
| mgauss |
| Overskrifts nøjagtighed | ||||
| Magnetisk retningsnøjagtighed |
| 0,5 |
| ° |
| Horisontal holdningsnøjagtighed | ||||
|
Pitch vinkel nøjagtighed |
| 0,1 |
| ° |
| Rullevinkelnøjagtighed |
| 0,1 |
| ° |


